The project started few months ago. I like to program and creating robot has been my dream for a long time (since 1987). I just decided that now it is time to do it.
I already had Raspberry Pi, laying in my desk. Once Raspberry Pi 2 was released I ordered one.. something needs to be done with these...
I was checking my sons room.. Lego's all over. I thought that wouldn't it be cool to have robot that sorts all the Lego's in size and colour order to the floor or just takes them into the Lego box. So this is where this started. Enough challenges ;)
I thought that I make cheap one.. only two motors so it is cheaper. Well I am not sure if I saved any money yet ;)
I started by googling around to find out what kind of projects others have done and what kind of algorithms have been used to keep two wheeled robots in balance. I learned a lot.. Trying to avoid mistakes that others have done.
List of things to restudy and study:
- Electronics and interfacing
- Designing schema
- 3D CAD
- 3D printing
- I2C
- Neural Networks
- Fuzzy Logic
- Mapping of surrounding areas using ultrasonic distance sensor / IR sensor
- OpenCV with Raspberry Pi
What has been this far...
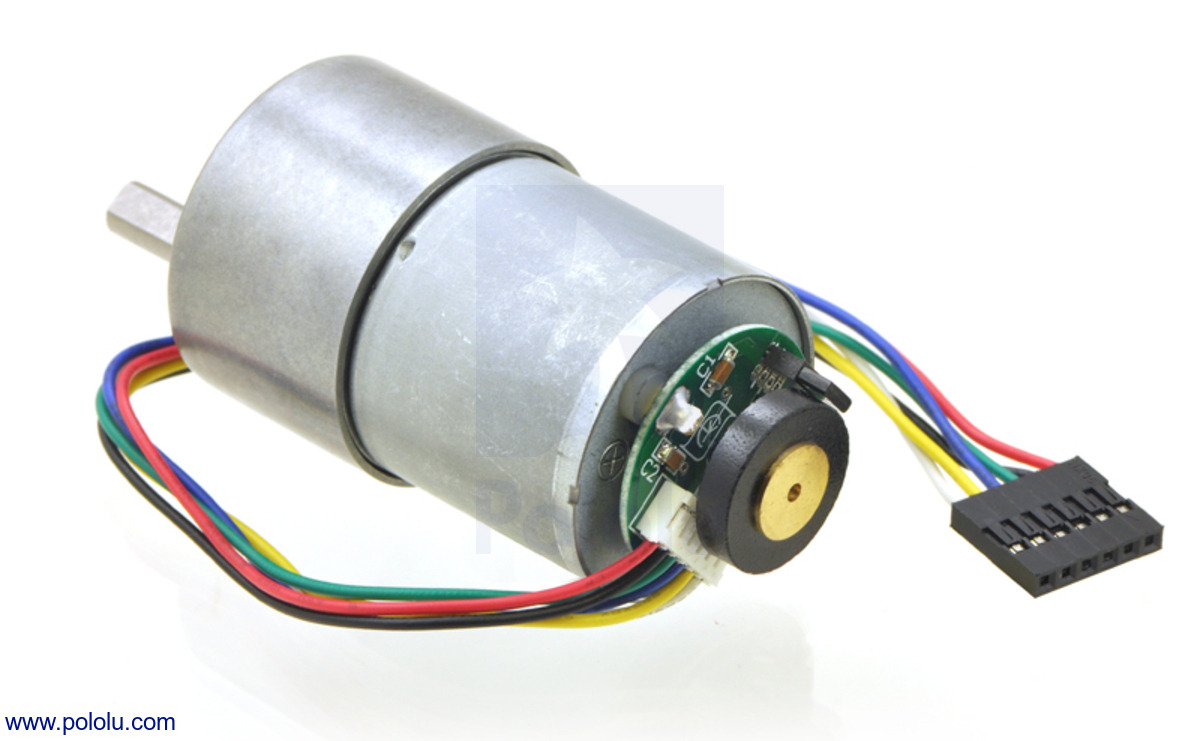
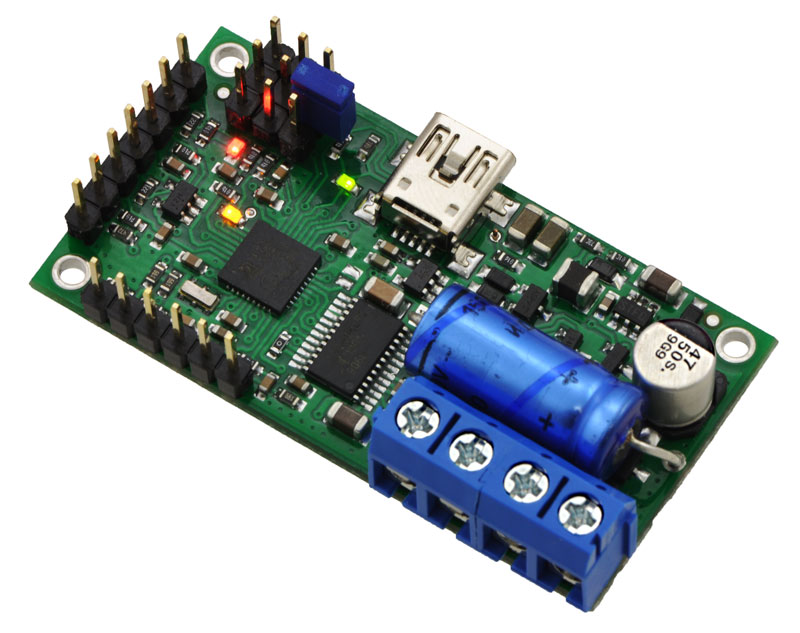
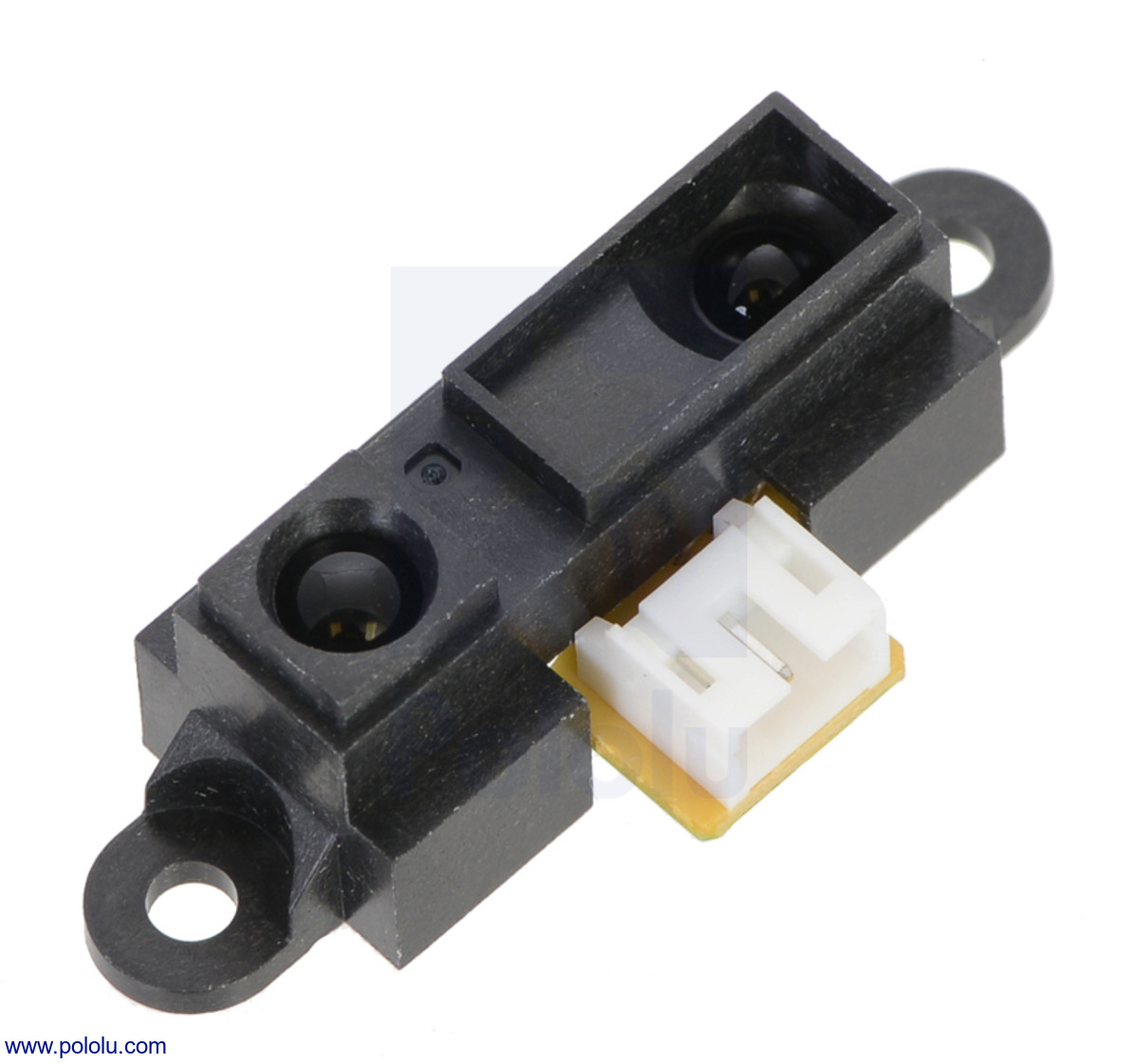
- some of the components ordered (motors, motor controller, IR sensor, Ultrasound sensor, IMU (compass, barometer/altimeter, accelerator sensor and gyro, wheels, wheel connectors). Not sure these components are all used in the robot. Wanted just to get something touchable into my hands. You can find these from pololu.com. There is distributors of these also in Europe.
- Some pictures here, detailed list later...



- some 3d drawings done using FastCAD. Some learning to do... I'll share some pictures later.
- decided to build the robot using biltema "air tubes" like these:


because these were cheap. The straight tube is attached T-part. The T-part will be cut to half from the T top. This half T part will be on the bottom of the robot. I need to make the T part a little wider to cover the wheels.
Inside the tube there will be 4 threaded M6 rods and several plastic disks (atleast 4). The plastic disks will be fit into correct height with nuts. I will save space in the middle of the tube for 4 DOF robot arm, this arm would be used then for picking the Legos.
Inside the T-part there will be 3D printed part which will hold the motors and IMUv4 sensors. On top of the robot there will be 3D printed "hat" which have 2 servos installed for rotating, tilting the ultrasonic sensor and camera (and maybe Ir sensor too). Some 3D printed holders for Raspberry PI 2 and other PCB's.
Near future plan is to get the 3D plan done and schematics ready (just started).
Let's see if this will be just one way to spend your euros or will I finally get something ready. I have no schedule so this can be long project.